
Fachhochschule Dortmund not only offers its architecture students a little finger, but also a whole (robotic) arm: In the "Digital Methods in Architecture" course, complex and precise spatial structures can be planned and produced with the help of an industrial robot. The combination of theory and practical experience has advantages for the course and for job qualification.

Spatial structures are three-dimensional structures consisting of a network of rods. These stable structures can bridge large spans without massive supports, which makes them particularly interesting for architectural applications.
These "spaceframes", as they are also known, face a particular challenge, explains Professor Dr. Volker Helm: "On the one hand, they should be as light as possible and consist of as little material as possible and, on the other, offer the greatest possible stability."

While these structures have long been calculated with the help of computers, their design possibilities are often limited by standardized production processes. This is precisely where the Fachhochschule Dortmund's "Digital Methods in Architecture" department comes in, using end-to-end digital planning and fabrication methods to enable extraordinary designs. The special feature here is that an industrial robot acts as a co-worker during production.
Just like a human arm with a shoulder, elbow and wrist, the robot also has joints. However, in contrast to this, the machine scores with very high precision and endurance. In a shower of welding sparks, it holds the individually shortened metal rods in the calculated position with millimeter precision until the weld seam is in place. With the same precision, the arm picks up the next rod, cuts it to size and places it back on the structure.
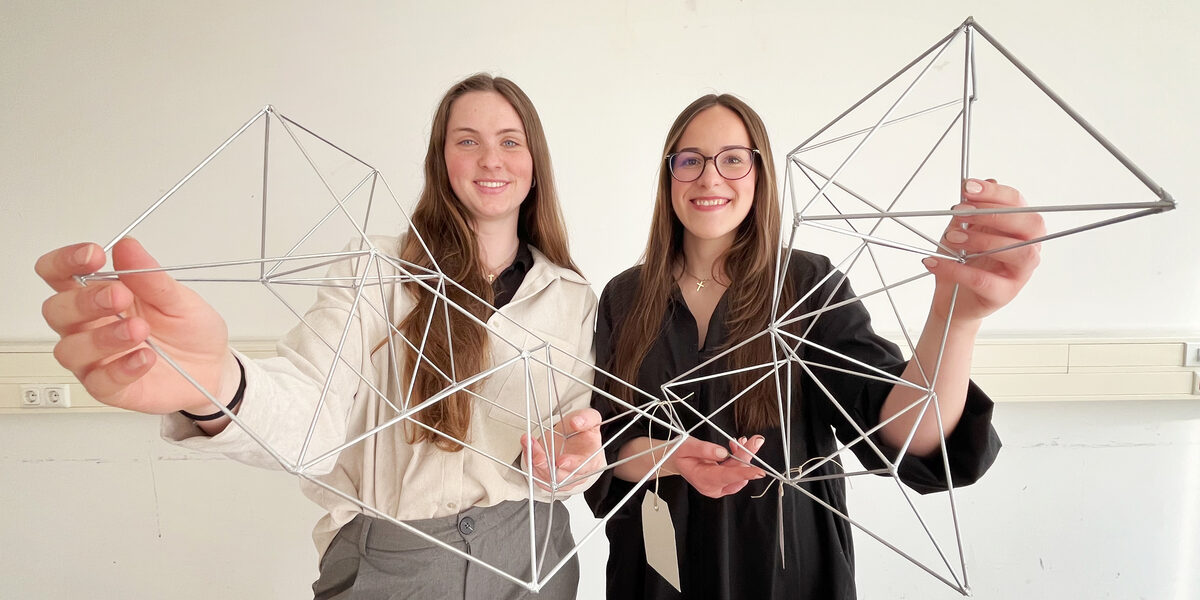
Julia Grauert and Neele Fastenrath, two Bachelor's students from the Faculty of Architecture, developed an individual spatial structure made of steel rods in the form of an exhibition stand as part of the "Digital Methods Special Areas" module. Their designs, inspired by a claw and a wave respectively, were developed using a 3D modeling program and checked for stability - structurally delicate, visually spectacular.
In addition to the robot, the students also appreciate the software used to plan and analyze the structures. "This allows us to map the entire digital process chain - from the 3D model to digital production - and offer future-proof and practical teaching," emphasizes Professor Helm.

The module "Digital Methods Special Areas" was led by Prof. Dr. Volker Helm, Hendrik Preu B.Sc. and Paul-Andreas Maurer B.A. Other participants are Dipl.-Ing. Benjamin Radhoff, Josha Helmchen M.A., Martin Wossning and Nils Ebler.