Mobile robots are complex software-intensive systems whose development is a challenge for developers. There are numerous approaches to system architectures for mobile robots, both as a monolithic system and as a distributed system within a robot. The aim of Uwe Jahn's dissertation is to develop a generally valid system architecture for a typical mobile robot in order to greatly simplify the development of mobile robots. To define a typical mobile robot, a taxonomy of classes, application areas, capabilities and technical realizations of mobile robots is developed based on an extensive literature research.
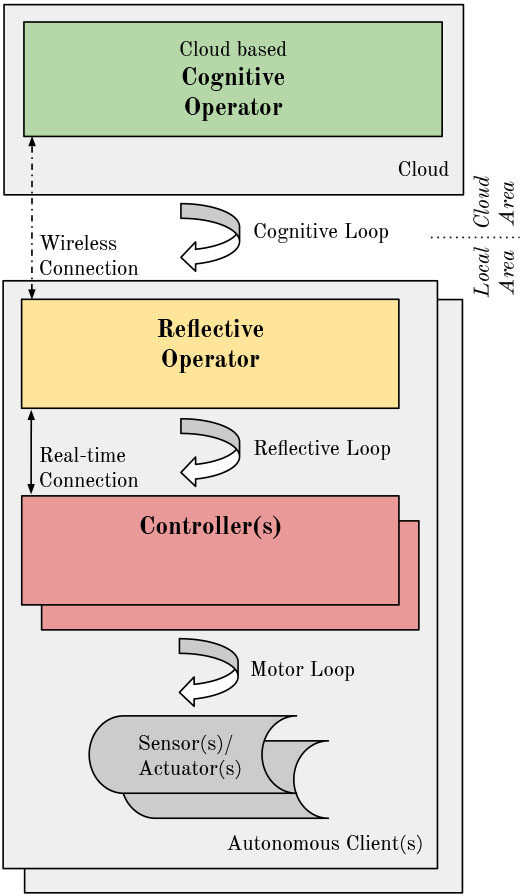
The system architecture is described in the form of a conceptual model. A distributed system from the three-layer architecture of the operator-controller module is used as the basic structure (see Fig. 1). The three hierarchically separated layers consist of a controller level, at least one reflective operator and one cognitive operator. The controllers are directly connected to the sensors and actuators of the robot, so that compliance with hard real-time is supported. The cognitive operator, on the other hand, is used to optimize the system and does not need to be implemented in real time, so the conceptual model provides for the cognitive operator to be executed in the cloud. In addition to the structure, interfaces and functions such as watchdogs to increase safety are taken into account in the conceptual model. Typical system components for mobile robots are also defined with the motion, health and perception controller.
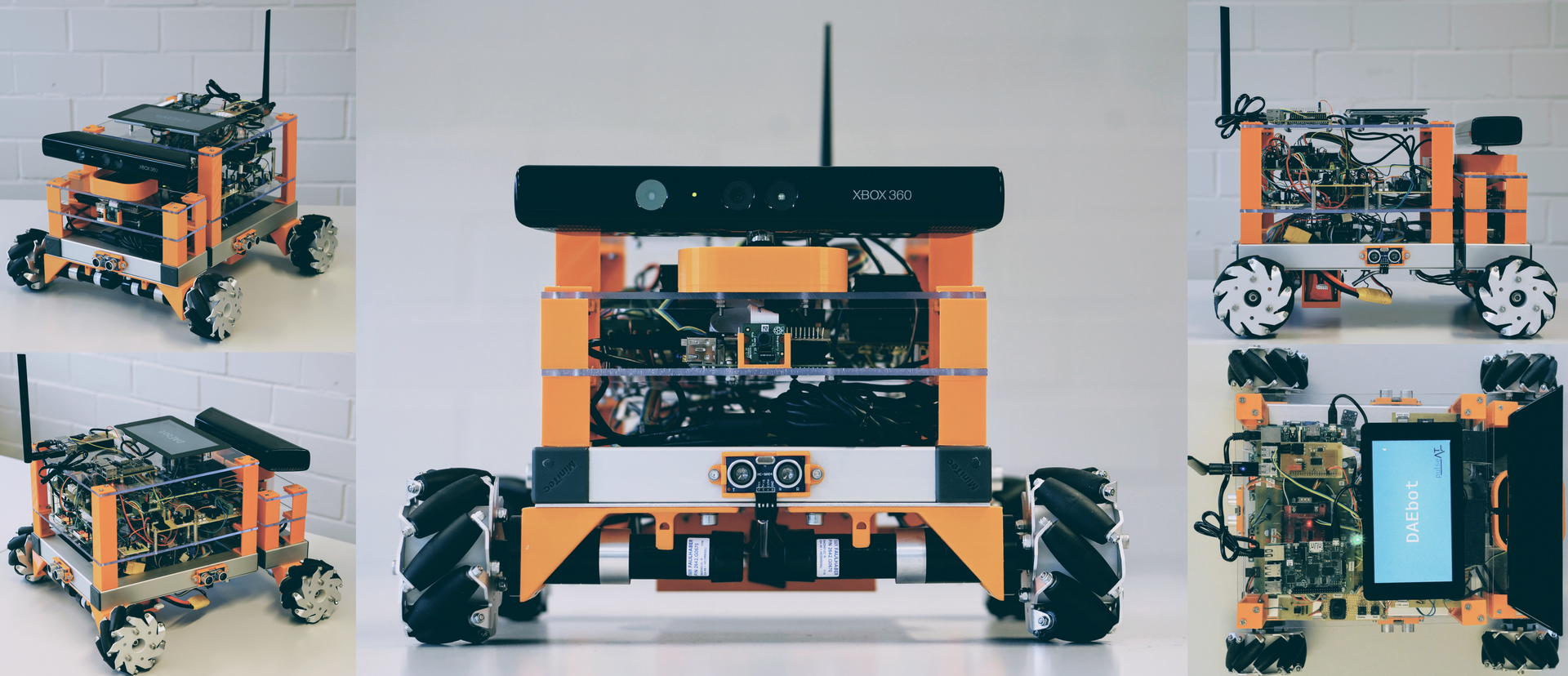
Das konzeptionelle Modell wird zudem im Rahmen der Promotion experimentell umgesetzt. Hierzu wird die Entwicklung des mobilen Roboters DAEbot gezeigt (siehe Abb. 2). Durch die Nutzung von vergleichsweise energieeffizienten Single Board Computers (SBCs) in Kombination mit Cloud-Computing ist der DAEbot energieeffizient und kann trotzdem auf ausreichend Rechenkapazität zurückgreifen. Die Umsetzung enthält u. a. die Entwicklung einer Toolbox zur modellbasierten Entwicklung sowie die Erweiterung des CAN-Busses. Mittels eines im Rahmen dieser Arbeit entwickelten Analyse-Tools namens pulseAT wird die Systemauslastung aller Rechner des verteilten Systems überwacht, an zentraler Stelle gesammelt und analysiert. Hierbei werden u. a. die Antwortzeit der einzelnen Rechner sowie die Einhaltung der Echtzeit überprüft. Dies erhöht die Zuverlässigkeit des mobilen Roboters.
Uwe Jahn absolvierte den Bachelor und Master im Studiengang Informations- und Elektrotechnik an der Fachhochschule Dortmund. Die mobile Robotik, System- und Softwarearchitekturen sowie parallele und verteilte Systeme waren seine Forschungsschwerpunkte als wissenschaftlicher Mitarbeiter an der Fachhochschule Dortmund. Von 2015 bis 2021 promovierte er zum Doktor-Ingenieur im Rahmen einer Kooperation zwischen der Universität Bielefeld (CITEC) und der Fachhochschule Dortmund (IDiAL). Seine Dissertation verteidigte er am 23.11.2021.
Appraiser
- Prof. Dr.-Ing. Ulrich Rückert (CITEC, Bielefeld University)
- Prof. Dr.-Ing. Peter Schulz (HAW Hamburg, formerly IDiAL, Fachhochschule Dortmund)
- PD Dr.-Ing. Sven Wachsmuth (CITEC, Bielefeld University)